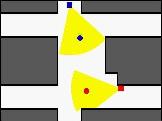
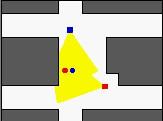
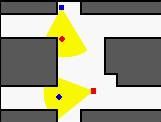
Target tracking in an environment with holes, the observer is the blue disc the target the red dot, the obstacles are shown in black and, the yellow cone is the perceived observer area
Target tracking in an environment with holes,
the observer is the blue disc the target the red dot, the obstacles
are shown in black and, the yellow cone is the perceived observer area
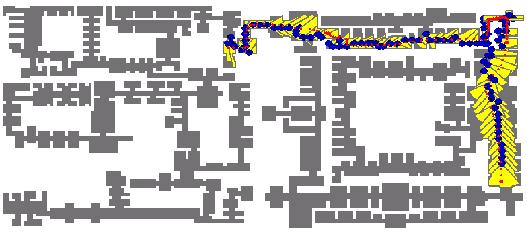
Target tracking in a map with thousand of vertices (a portion of the Louvre museum)
| Multi-robot target tracking. The red observer start tracking the red target and the blue observer the blue target | The shortest distance to escape is computed on the union of the observes visibility regions | The best strategy to maintain targets visibility was to switch targets, there is not assignation between targets and observers |
 |
 |
 |

Target tracking with a real robot, the camera pointing
to the ceiling is used to localize the robot using landmarks. I did
this experiment during my postdoc at Stanford University