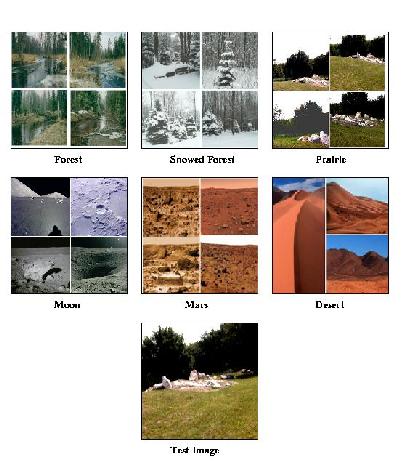
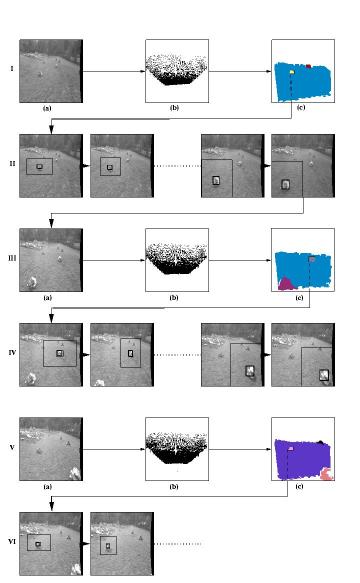
Environment recognition
Environment recognition
| Original Images | Segmented and classified images | Class |
 |
 |
 |
 |
 |
|
 |
 |
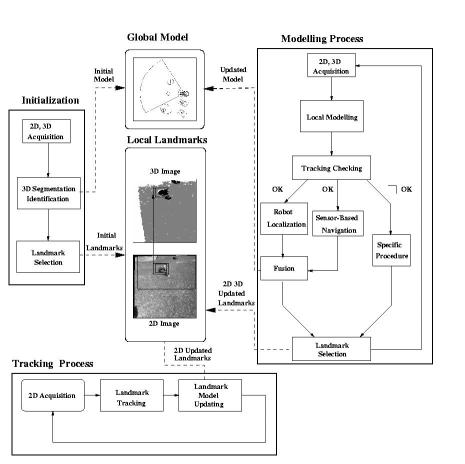
A vision system for outdoor robot navigation
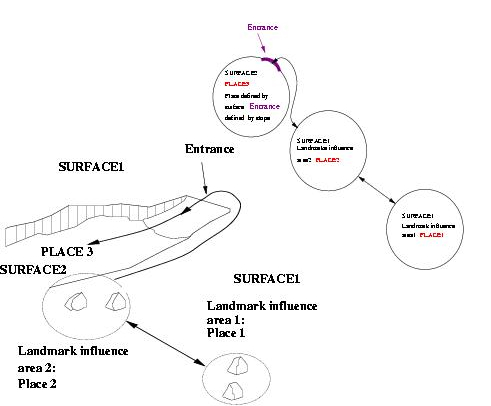
Environment Modeling
 | 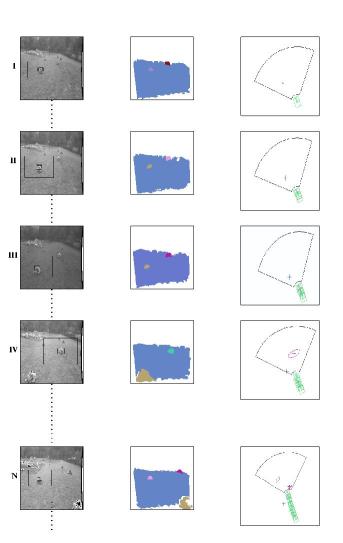 |
| Robot visual navigation based on landmarks | Simultaneous Localization and Modeling (SLAM) |