 |
 |
|
|
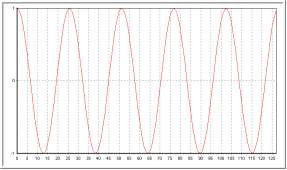
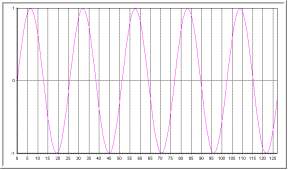
imag(1) = rampax(1,128,1.0)
imag(2) = imag(1) * 0.24543692
imag(3) = cos(imag(2))
imag(4) = sin(imag(2))
2) Muestre la parte real e imaginaria de la exponencial compleja
exp [ (2 pi i (5x + 3y)) / 128 ] para x = 0, ... 127, y = 0 , ... 127 (en 2D) |
 |
imag(1) = rampax(128,128,1.0)
imag(2) = imag(1) * 0.245436921715736
imag(3) = rampay(128,128,1.0)
imag(4) = imag(3) * 0.147262156009674
imag(5) = imag(2) + imag(4)
imag(6) = cos(imag(5))
imag(7) = sin(imag(5))
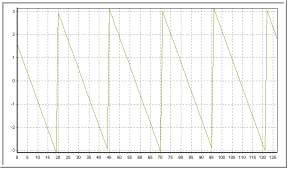
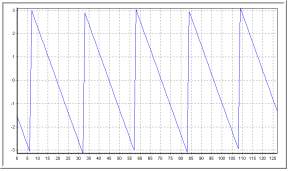
3) Muestre la magnitud y fase de las se˝ales de los ejercicios 1 y 2.|
imag(1) = rampax(1,128,1.0) imag(2) = imag(1) * 0.24543692 imag(3) = cos(imag(2)) imag(4) = sin(imag(2)) imag(5) = pow2(imag(3)) imag(6) = pow2(imag(4)) imag(7) = imag(5) + imag(6) imag(8) = sqrt(imag(7)) |

|
imag(1) = rampax(128,128,1.0) imag(2) = imag(1) * 0.245436921 imag(3) = rampay(128,128,1.0) imag(4) = imag(3) * 0.147262156 imag(5) = imag(2) + imag(4) imag(6) = cos(imag(5)) imag(7) = sin(imag(5)) imag(8) = pow2(imag(6)) imag(9) = pow2(imag(7)) imag(10) = imag(8) + imag(9) imag(11) = sqrt(imag(10)) |

|
|
imag(1) = rampax(1,128,1.0) imag(2) = imag(1) * 0.24543692 imag(3) = cos(imag(2)) imag(4) = sin(imag(2)) imag(5) = atan2(imag(4),imag(3)) |

|
|
|
imag(1) = rampax(128,128,1.0) imag(2) = imag(1) * 0.245436921 imag(3) = rampay(128,128,1.0) imag(4) = imag(3) * 0.147262156 imag(5) = imag(2) + imag(4) imag(6) = cos(imag(5)) imag(7) = sin(imag(5)) imag(8) = atan2(imag(7),imag(6)) |

|
|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
||||
float gaussiana(float s, float el, float th, float x, float y)
//s=desv. standard, el=elipticidad, th=angulo de inlinacion en radianes, (x,y)=punto de evaluacion
{
CMatriz R(2,2), Rt(2,2), D(2,2), T(2,2);//para más detalles sobre la clase CMatriz vea "matrices.h"
Cvector v(2);//Al igual que CMatriz, se trata de un objeto para facilitar las operaciones matriciales
v.M[0]=x;
v.M[1]=y;
D.cero();
D.M[0][0]=1;
D.M[1][1]=1.0/(el*el);
R.M[0][0]=cos(th); R.M[0][1]=-sin(th) ;
R.M[1][0]=-R.M[0][1]; R.M[1][1]=R.M[0][0];//inicializamos las matrices
Rt=R.transpuesta();
T=R*(D*Rt);
s=2*s*s;
return exp(-((v*T)*v)/s) / (M_PI*s);//La definición de kernel gaussiano
}
Nota: yo estoy midiendo los ángulos en el sentido de las manecillas del reloj!!,
es por eso que invertí la matriz de cambio de base
